DIY六足蜘蛛机器人
摘要
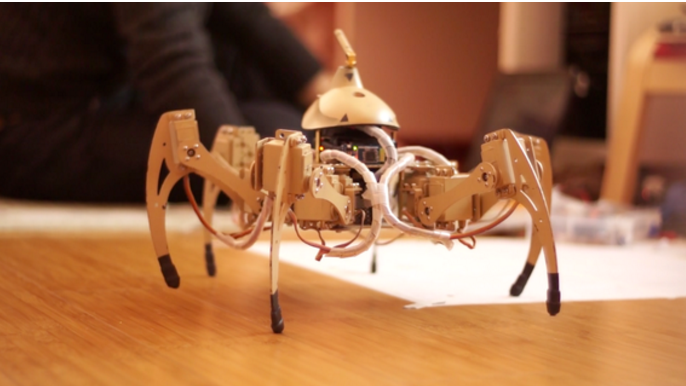
制作六足蜘蛛机器人
理论准备
六足机器人介绍
相关信息
六足机器人又叫蜘蛛机器人,是多足机器人的一种。仿生式六足机器人,顾名思义,六足机器人在我们理想架构中,我们借鉴了自然界。
六足步行机器人的步态是多样的,其中三角步态是六足步行机器人实现步行的典型步态。 “六足纲” 昆虫步行时,一般不是六足同时直线前进,而是将三对足分成两组,以三角形支架结构交替前行。目前,大部分六足机器人采用了仿昆虫的结构,6条腿分布在身体的两侧,身体左侧的前、后足及右侧的中足为一组,右侧的前、后足和左侧的中足为另一组,分别组成两个三角形支架,依靠大腿前后划动实现支撑和摆动过程,这就是典型的三角步态行走法
制作思路
使用3D 打印制作机身结构,使用舵机作为运动控制,使用Arduino Nano 芯片作为控制中枢。
六足的每个足都有三个自由度,因此每条腿有三个舵机,这里需要18个舵机,另外,加头部转动的舵机一个。Arduino 芯片不能提供大电流供电,因而需要一个舵机控制版,还需要一块大电流放电能力的电池,考虑使用航模电池。
简单来说,舵机控制板就是机器人的中枢神经,负责动作协调,另外的机器人主控就是大脑,负责处理外界信息,统一指挥,机器人扩展的传感器就是感官系统,负责接收外界信息。舵机控制板并不是机器人的核心,它只是负责控制舵机的模块而已,功能再多也只能让机器人跳跳舞啥的,想实现机器人智能化必须要添加另外的主控,也就是给机器人装个大脑。
需要的材料
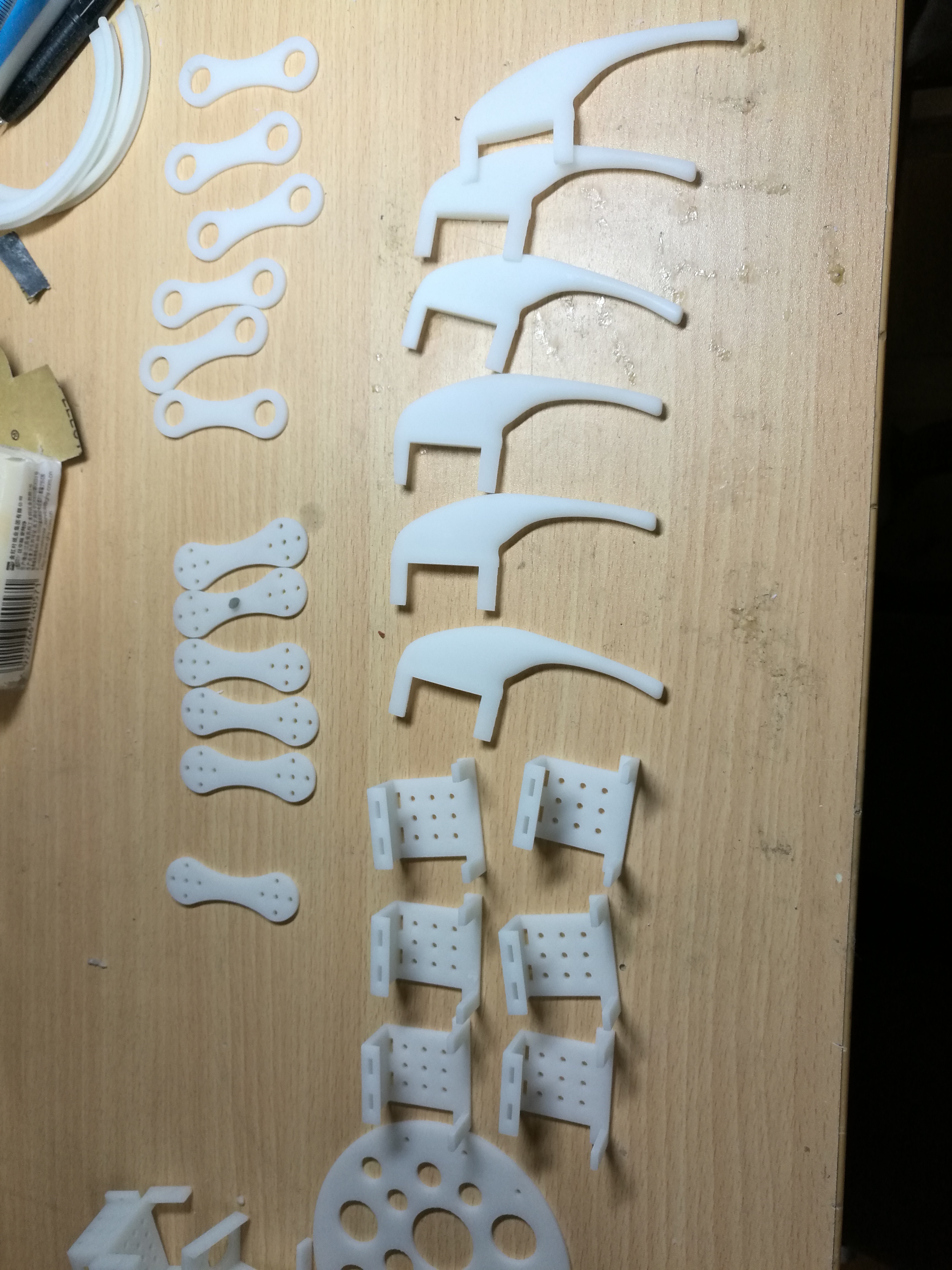
设计机器人的腿、身体结构并建模
楼主建模使用了UG,具体的零件尺寸参考了这个图片,按照比例来建即可
当然,大家必须注意到,上图的机器人使用的材料是铝合金之类的金属,这类工艺加工需要CNC等工艺,价格实在不菲,因此楼主放弃了这种材料,改用树脂打印,因而建模的时候需要把厚度之类的增加一些,不然不足以提供足够的强度。
建模一共需要8种零件,分别包括:

组装
把舵机装到腿上,使用螺丝紧固,这就是一级运动关节
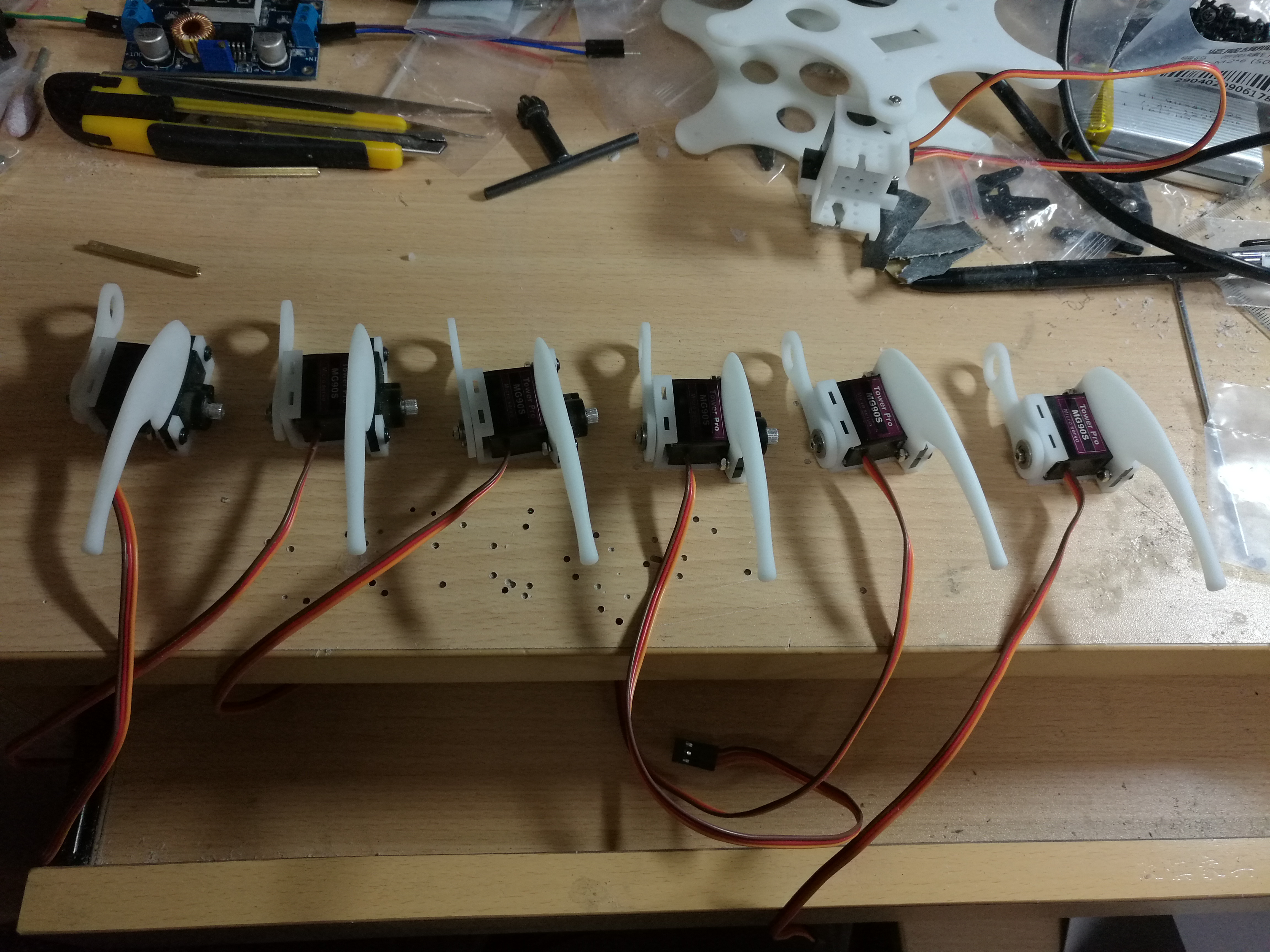
为关节连接部位安装舵机的转动矩,使用螺丝紧固

把二级关节跟一级关节连接起来并安装到身体上,再依次为机身安装舵机控制板(在机身中间)、Arduino芯片、蓝牙芯片、升压模块和电池
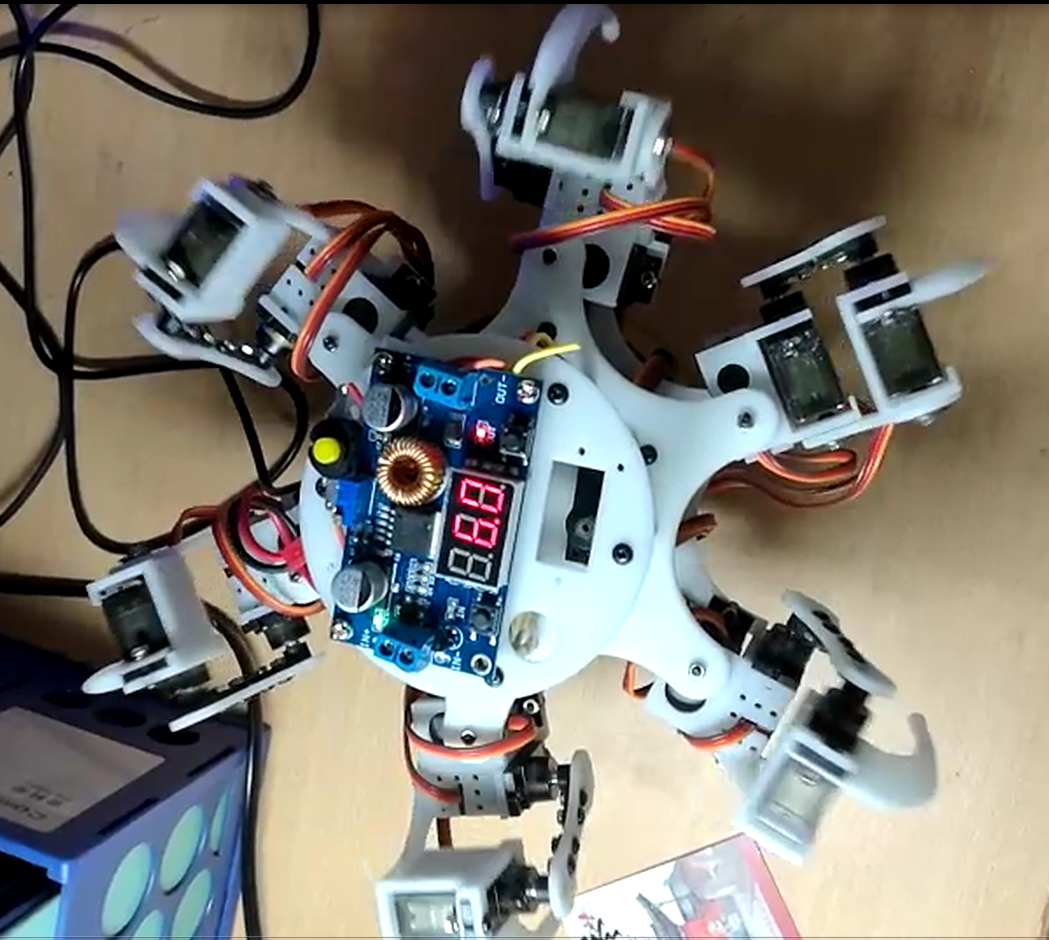
调试舵机控制版
安装完成后连接舵机控制版的控制软件,来测试一下效果吧(注意:应该在安装前先使用舵机控制版来控制舵机做测试,等调试正常后再安装!)